1
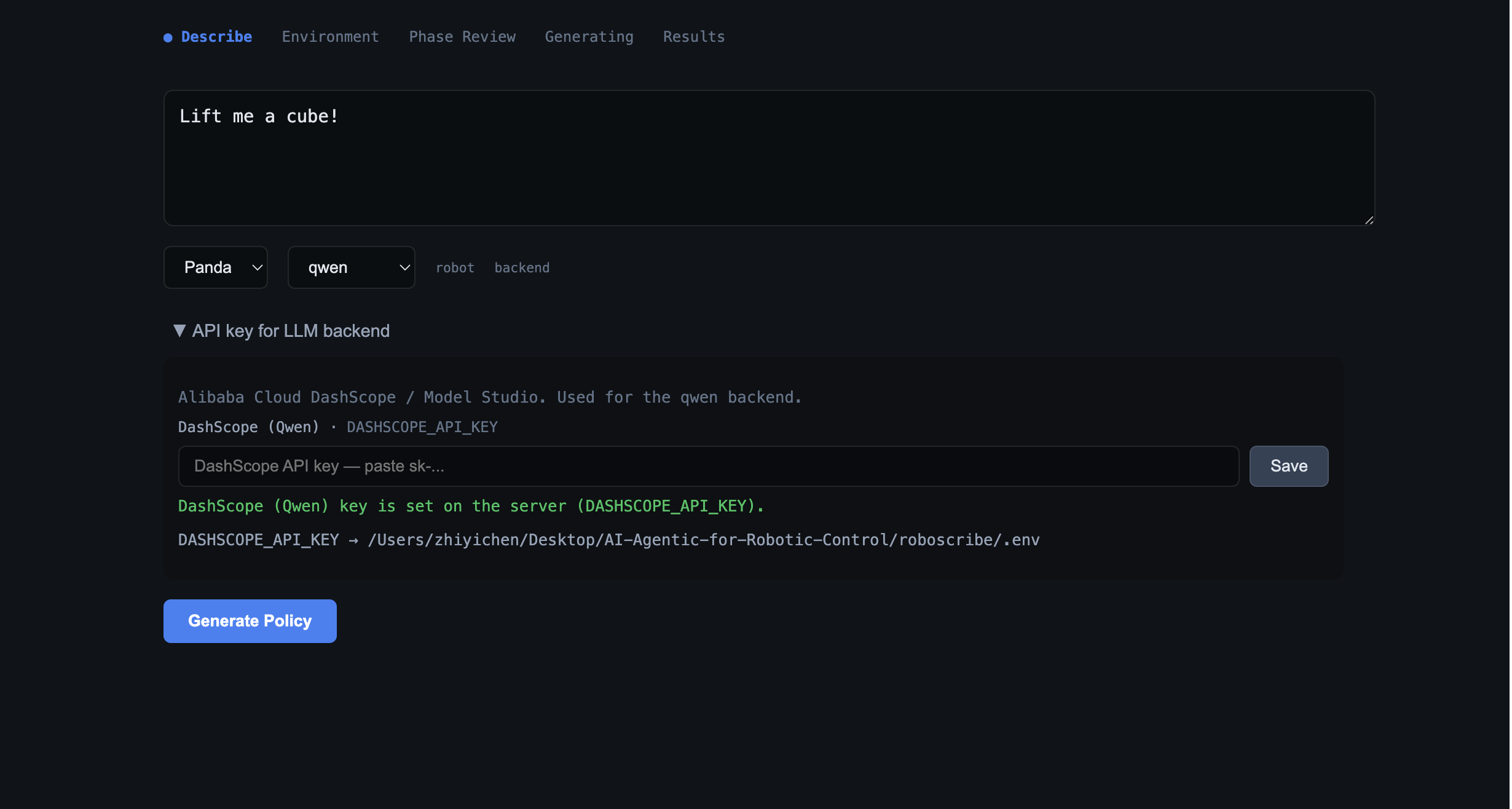
Describe task & set up
Type what you want the robot to do.
Language-guided policy generation for robosuite manipulation tasks.
UCLA
Researchers waste hours writing scripted robot policies, wrestling with simulator APIs, observation keys, and controller bugs instead of doing research. RoboScribe fixes this. Tell it what the robot should do in plain English. It builds a step-by-step plan for you to review, then writes, tests, and debugs the code automatically until the policy works.
You describe the task. The system figures out how to do it. Here's what happens under the hood.
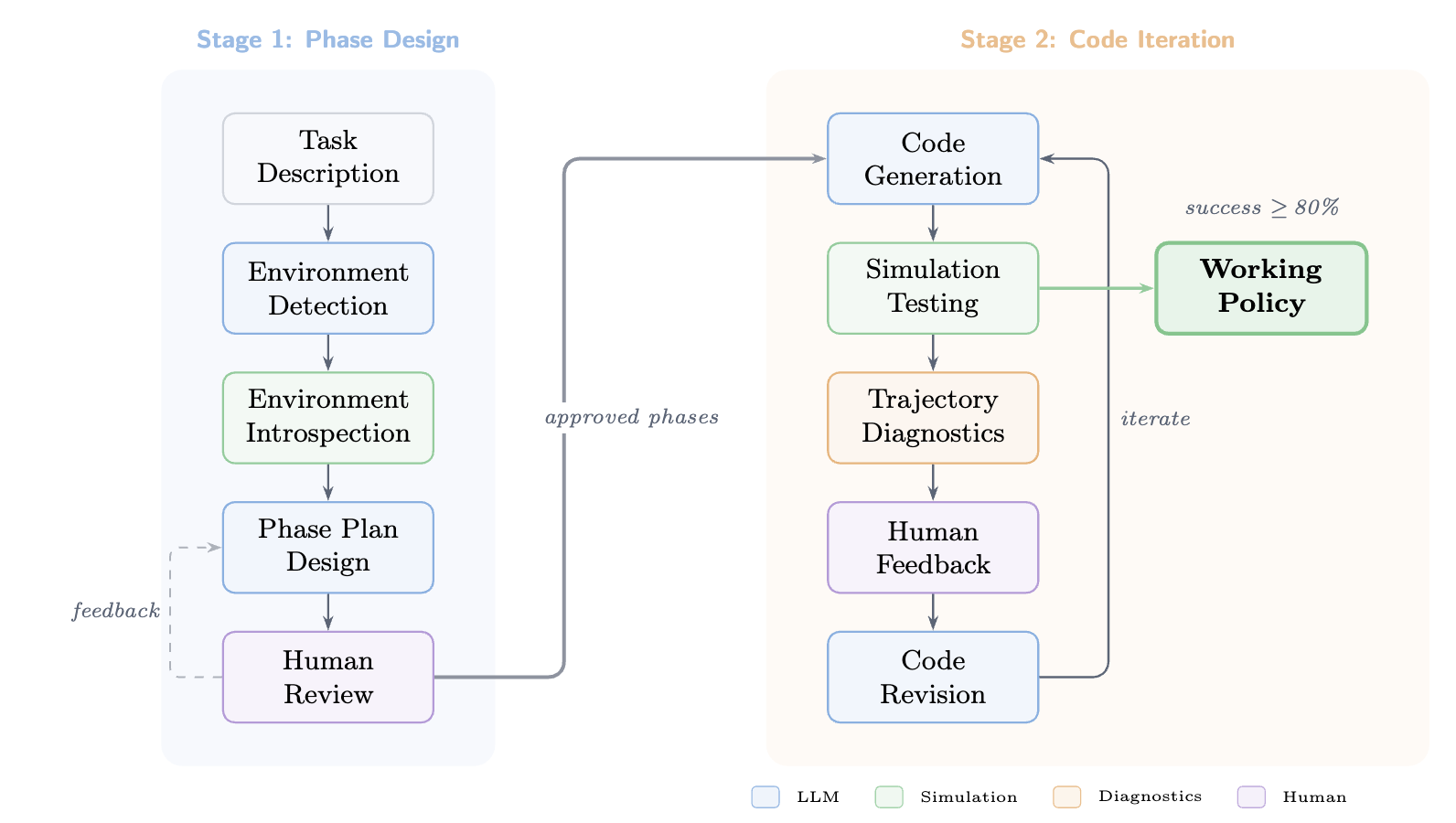
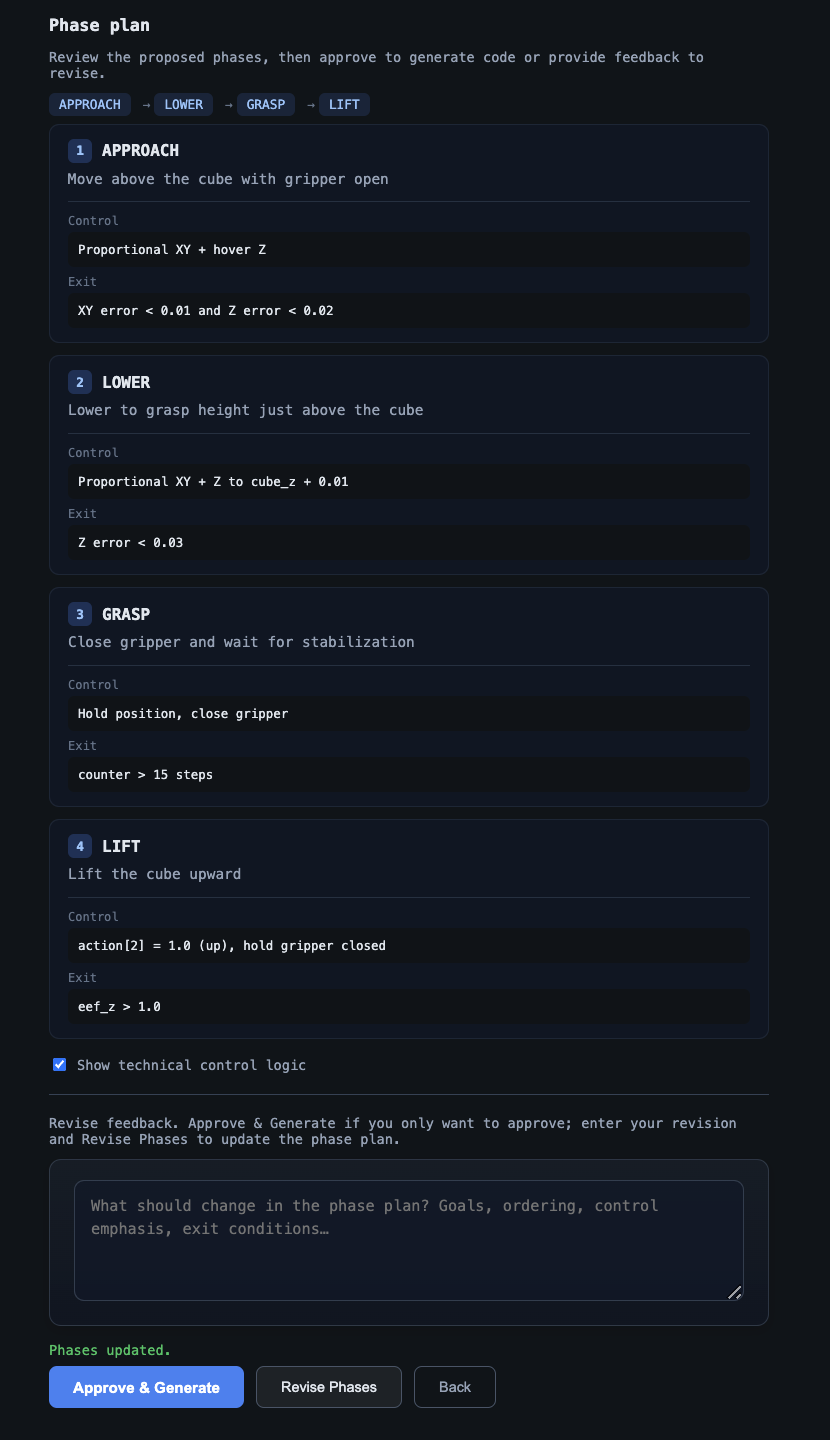
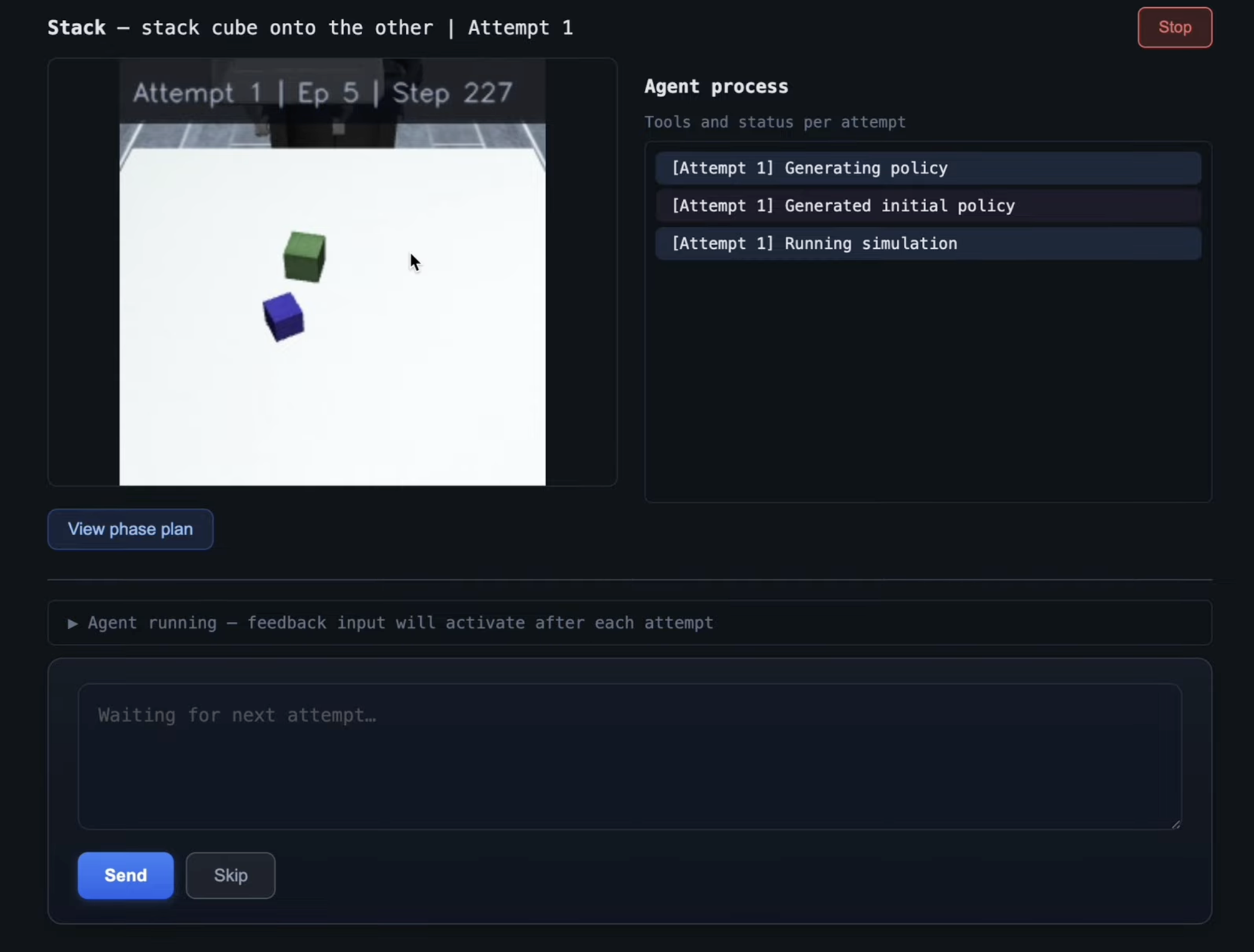
Figure 1. Two stages. First, the system detects your environment and proposes a plan — you review it. Then it writes the policy, runs it in simulation, reads what went wrong, and tries again.
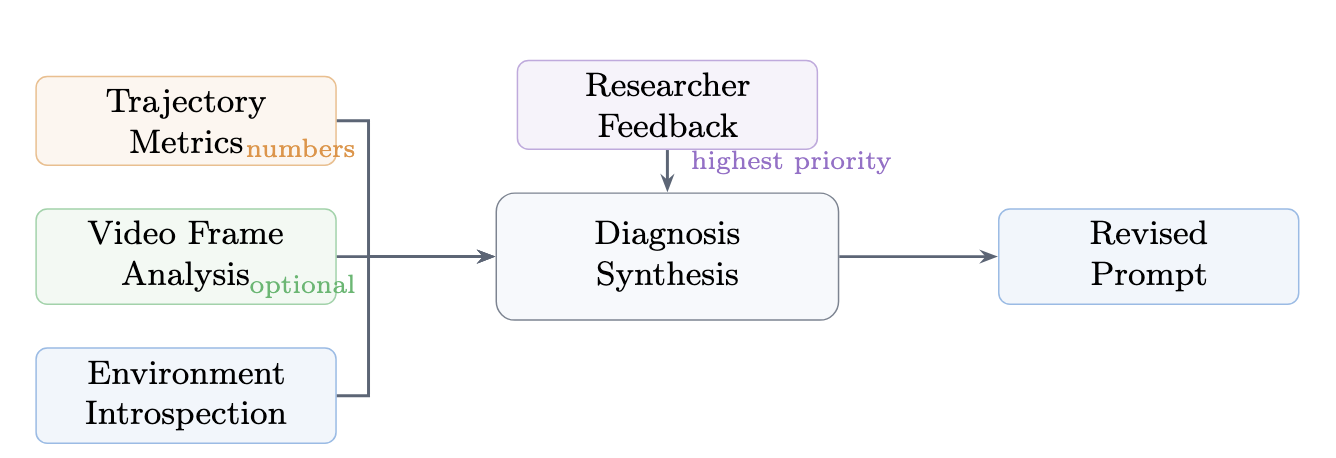
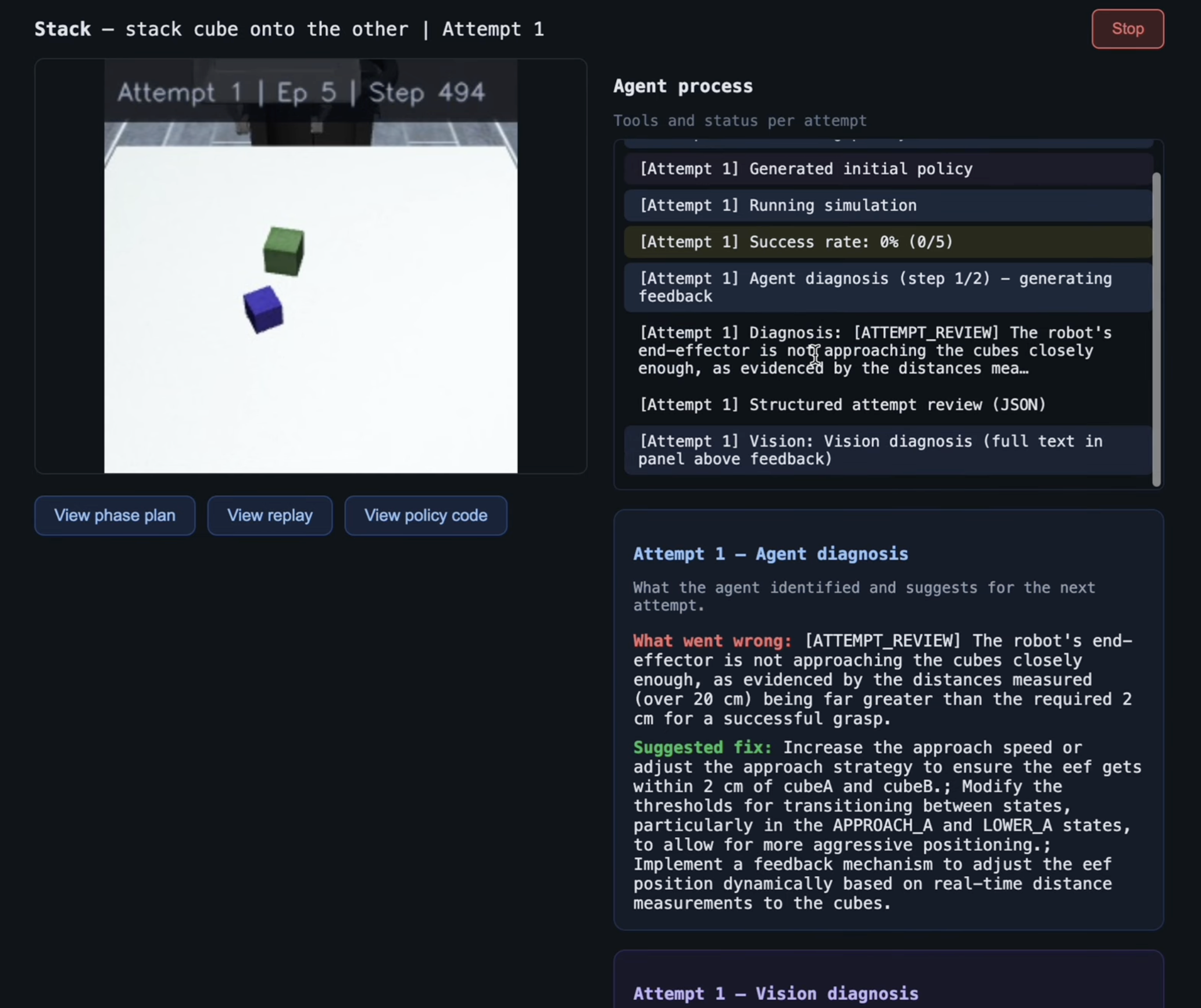
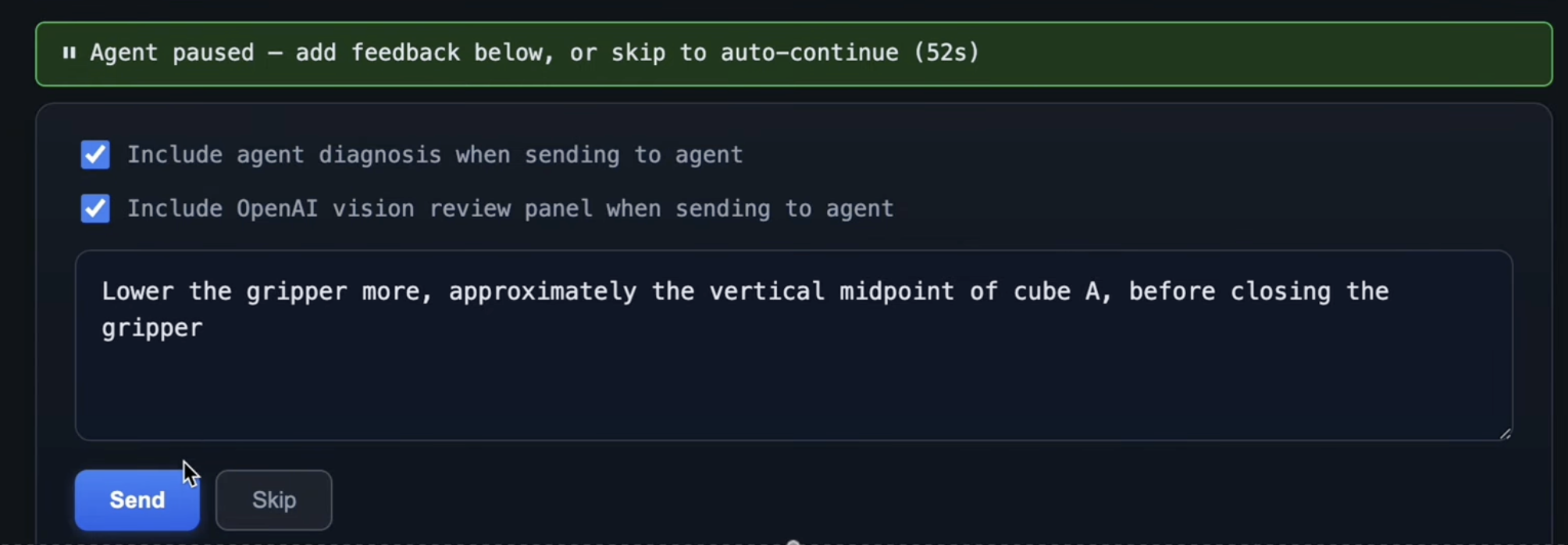
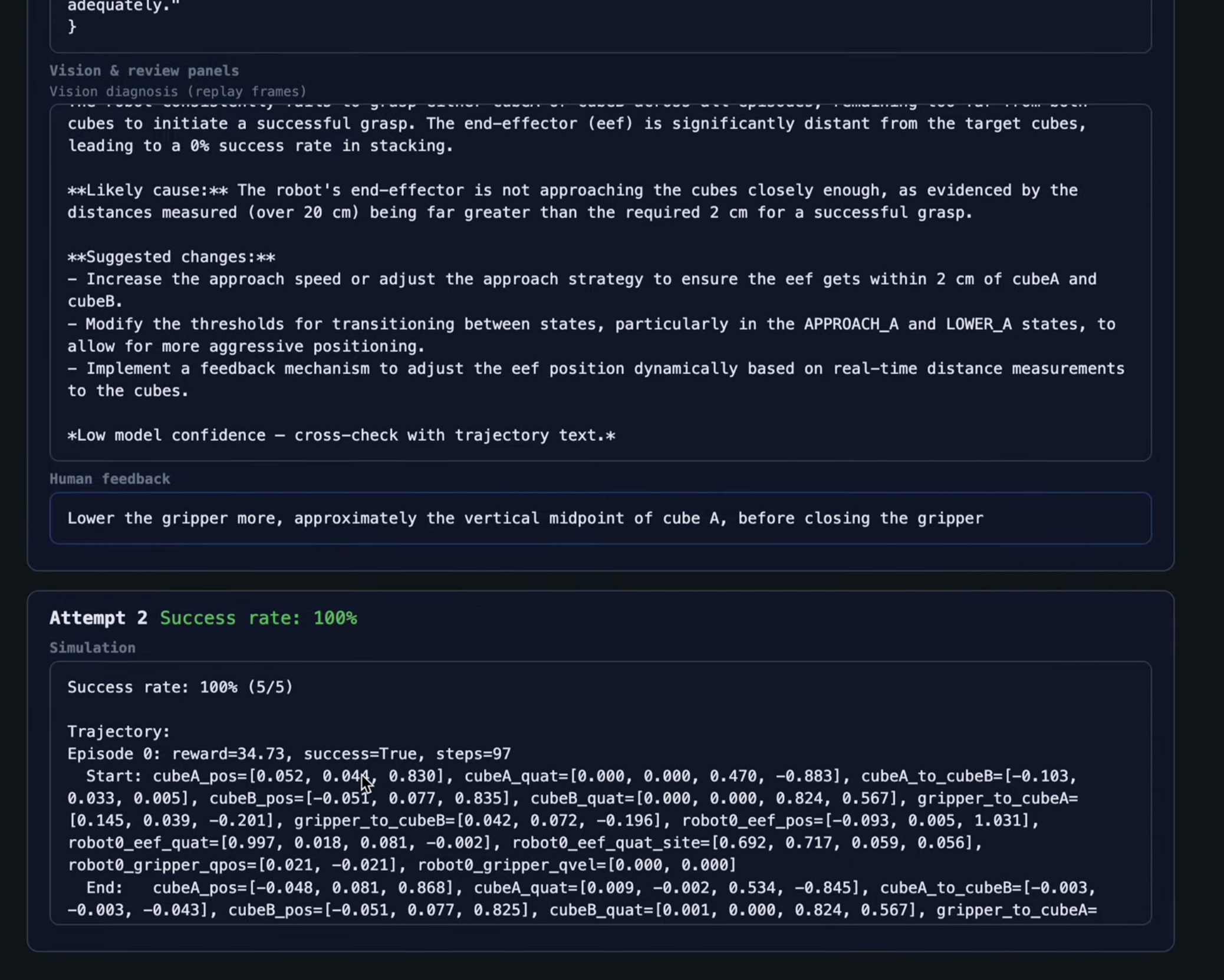
Figure 2. When a policy fails, the system combines trajectory data, optional vision analysis, and your feedback to figure out what went wrong — then fixes it.
Full walkthrough from task input to working policy.
Full UI run: task input, phase review, policy iteration, success.
Five steps from idea to working policy.
Type what you want the robot to do.
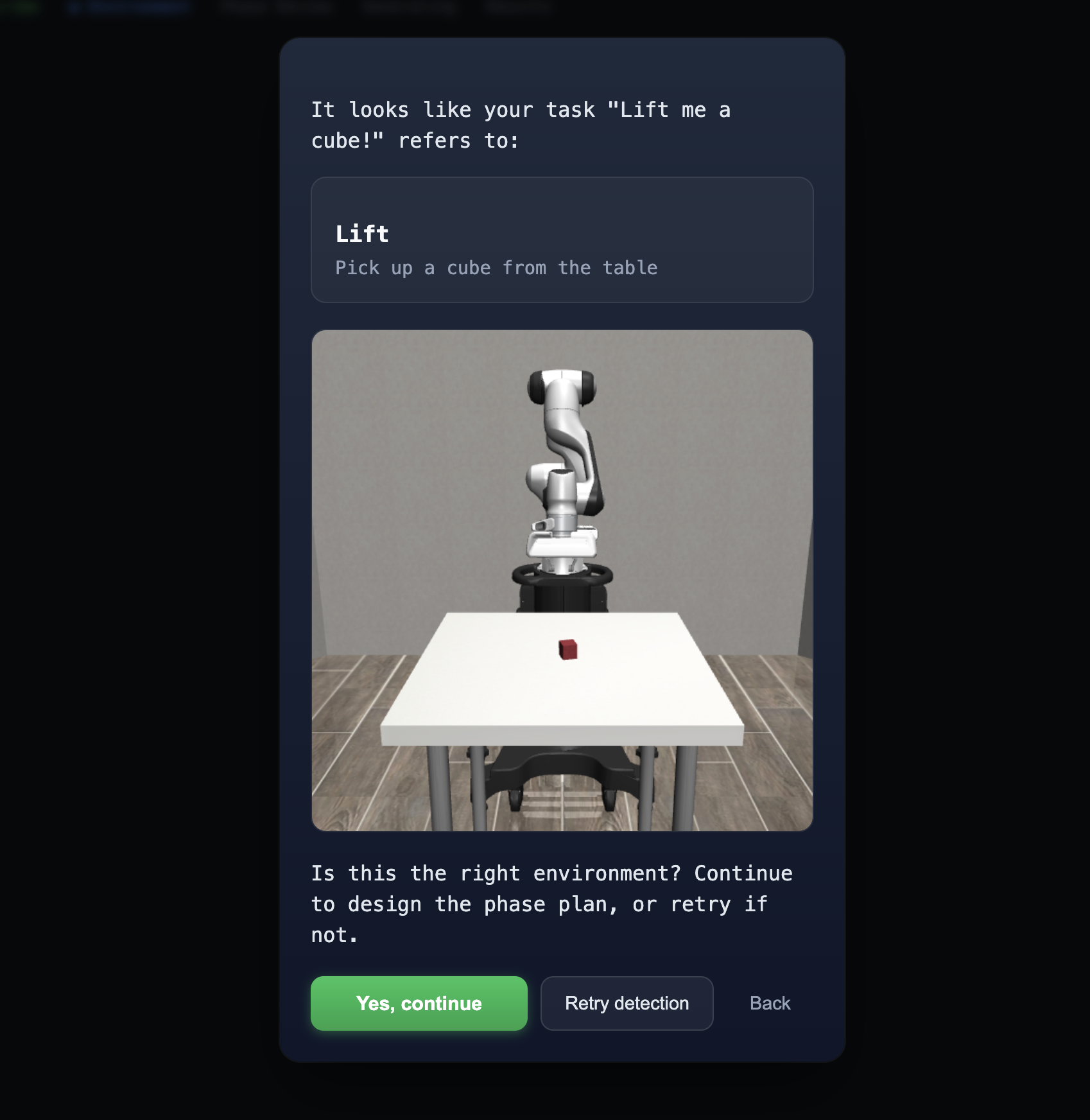
The system picks the right simulation environment. You confirm.
See the proposed plan. Edit it or approve it.
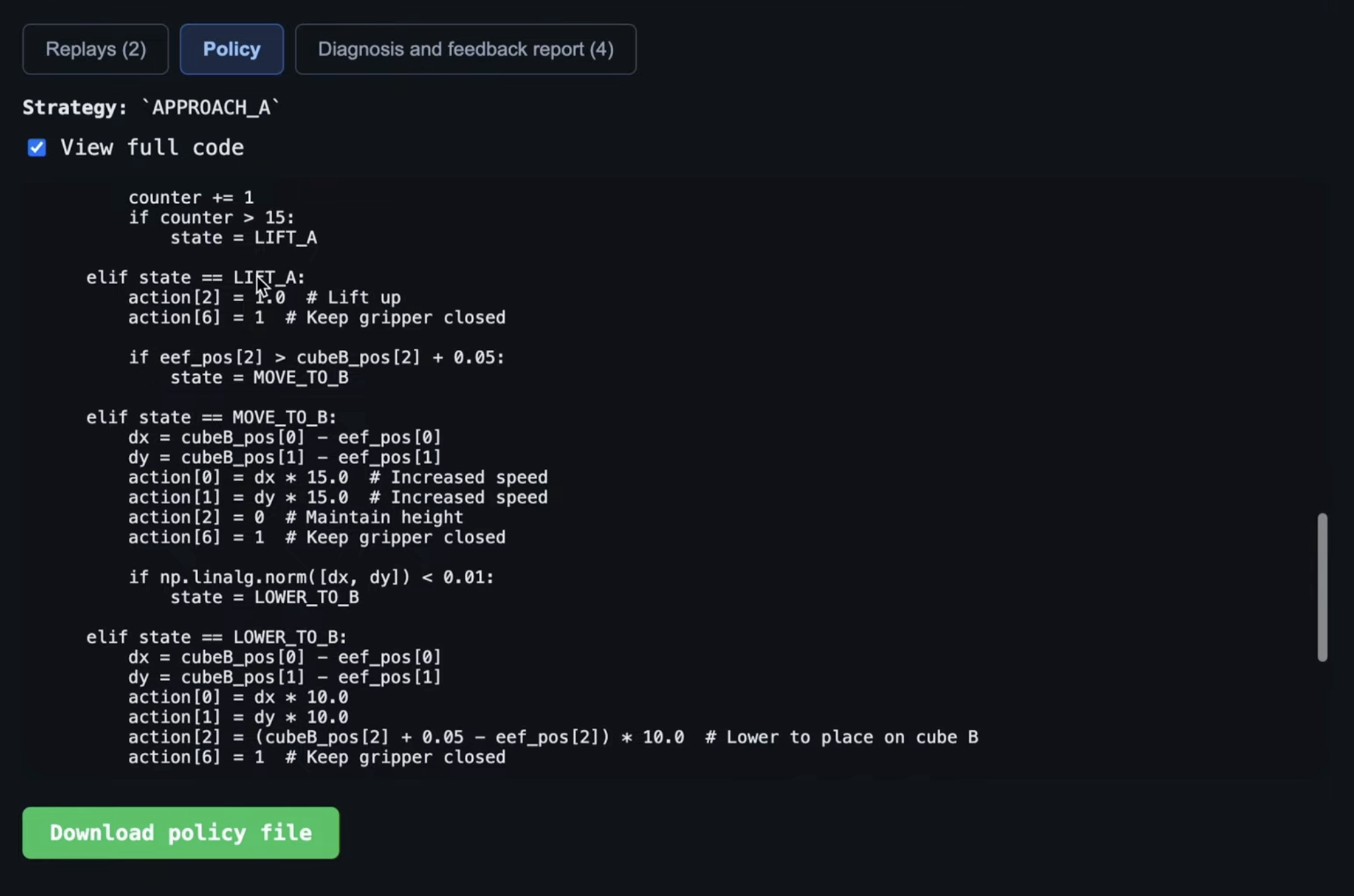
Code is generated, tested in simulation, and revised automatically.
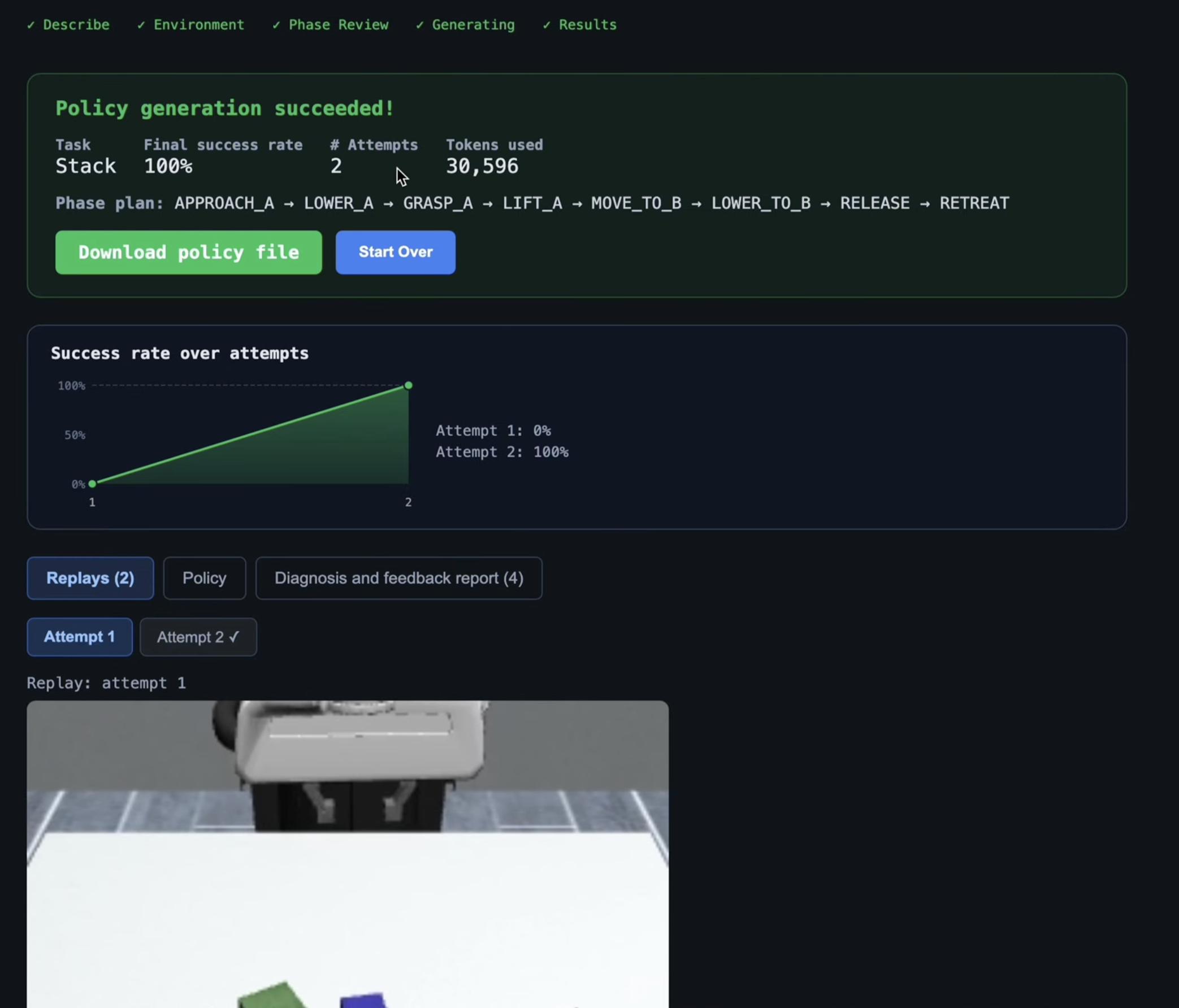
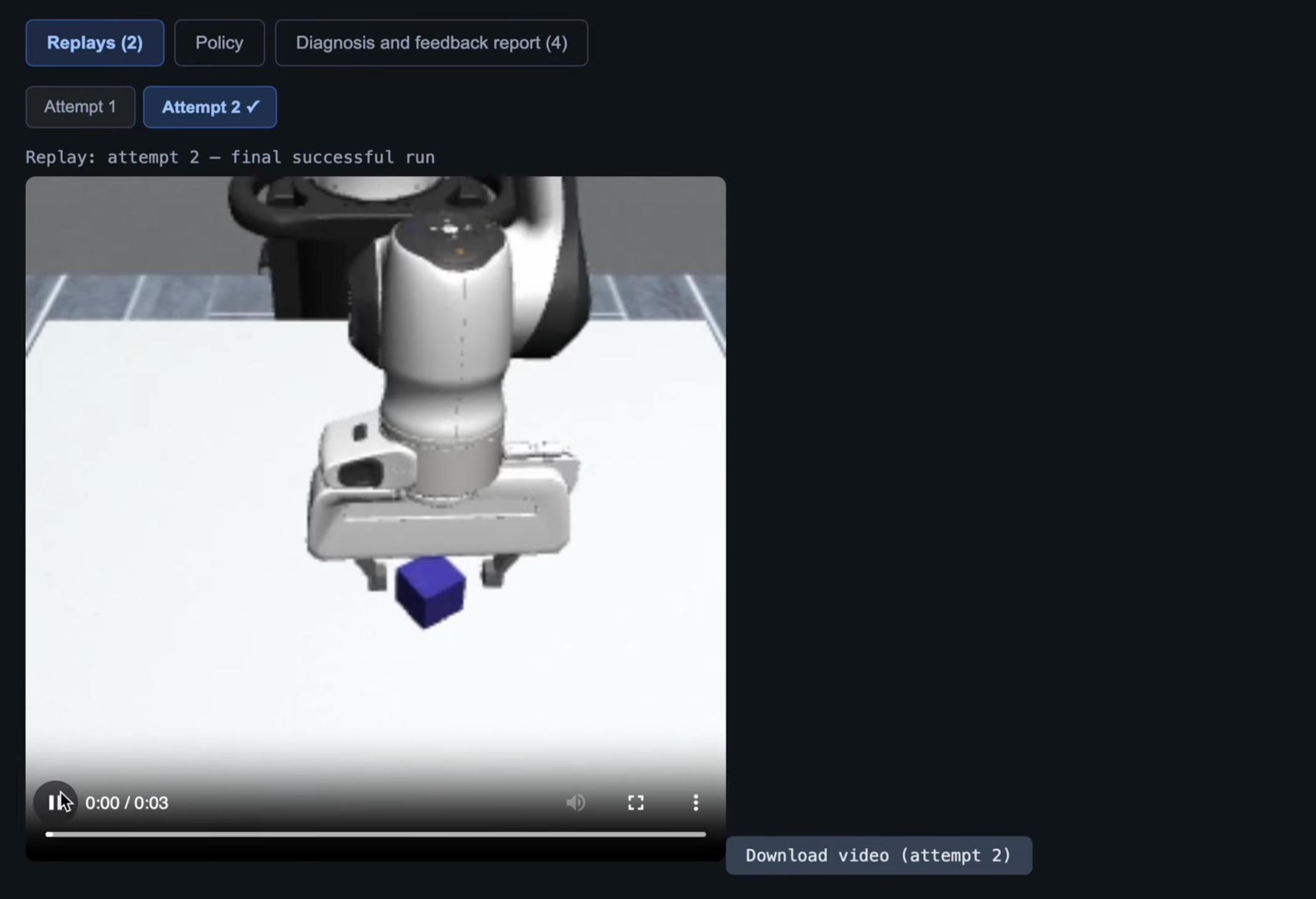
Download the working policy. Watch the replay.
We tested on four robosuite tasks, from simple picks to contact-heavy manipulation. All runs used Qwen with a Panda robot and no human feedback during iteration.
| Task | Geometric Precision | First Attempt | Iteration Helps? | Best Rate |
|---|---|---|---|---|
| Lift | Low (XYZ translation) | 100% | N/A (succeeds immediately) | 100% |
| Stack | Medium (two-object) | 0–100% | Yes (0%→100%) | 100% |
| NutAssembly | High (quaternion math) | 0–60% (variable) | No (regresses) | 40% |
| Door | High (rotation + pull) | 0% | No (stuck) | 0% |
Stack went from 0% to 100% in one revision. The system spotted an alignment error and fixed it.
| Attempt | Success | Diagnosis | Agent Action |
|---|---|---|---|
| 1 | 0% (0/10) | "eef not aligning with cube positions" | — |
| 2 | 100% (10/10) | — (success) | Fixed approach alignment logic |
Currently supported robosuite tasks. Each card shows a real rollout from a generated policy.
# Python backend (includes all dependencies)
pip install -e "roboscribe/[sim]"
# React frontend
cd roboscribe/src/roboscribe/frontend && npm install# Terminal 1 — Backend
cd roboscribe/src/roboscribe
uvicorn roboscribe.server.main:app --host 0.0.0.0 --port 8000
# Terminal 2 — Frontend
cd roboscribe/src/roboscribe/frontend
npm run build && npm run preview
Open http://localhost:4173. To preview this
documentation site:
cd docs && python3 -m http.server 8080 →
http://localhost:8080.
| Provider | Env variable | Notes |
|---|---|---|
| Qwen | DASHSCOPE_API_KEY |
Free tier |
| OpenAI | OPENAI_API_KEY |
GPT-4o, vision diagnosis |
| Anthropic | ANTHROPIC_API_KEY |
Claude |
| DeepSeek | DEEPSEEK_API_KEY |
Budget-friendly |